隨著汽車行業向軟件定義汽車(Software Defined Vehicle,SDV)轉型,整車電子控制單元(Electronic Control Unit,ECU)的架構正經歷深刻變革。虛擬電子控制單元(Virtual ECU,VECU)作為這一變革的核心技術,在集成開發與測試中發揮著關鍵作用。本文將探討VECU在軟件定義汽車環境下的集成開發流程與測試方法,涵蓋軟件開發的關鍵環節。
一、VECU的概念及其在軟件定義汽車中的意義
VECU是通過虛擬化技術模擬物理ECU功能的軟件實體,它允許開發人員在早期階段進行軟件集成、測試和驗證。在軟件定義汽車架構中,VECU支持硬件與軟件的解耦,使軟件開發不再依賴具體硬件,從而加速創新并降低開發成本。通過VECU,工程師可以并行開發多個功能模塊,并在虛擬環境中模擬真實車輛行為,大幅提升開發效率。
二、VECU集成開發流程
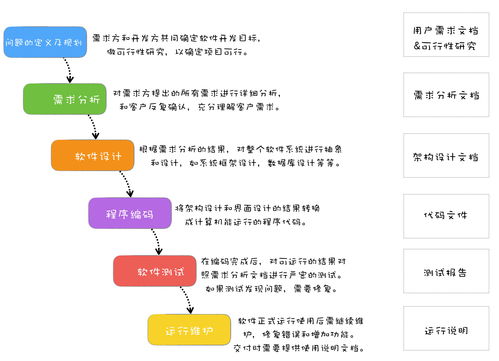
1. 需求分析與架構設計:基于整車功能需求,定義VECU的軟件架構和接口規范,確保模塊化與可擴展性。
2. 模型驅動開發:采用Matlab/Simulink等工具進行控制算法建模,自動生成代碼,并與VECU平臺集成。
3. 軟件組件集成:將應用程序、基礎軟件(如AUTOSAR組件)和中間件集成到VECU環境中,實現功能模塊的協同工作。
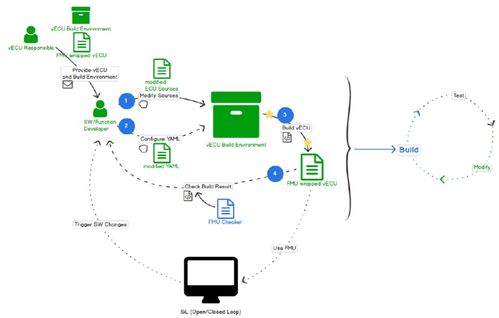
4. 持續集成與部署:借助CI/CD工具鏈(如Jenkins、GitLab CI),自動化構建、測試和部署VECU軟件,確保代碼質量與一致性。
三、VECU測試策略與方法
1. 單元測試與集成測試:在虛擬環境中對單個軟件組件及組件間的交互進行測試,及早發現接口錯誤和邏輯缺陷。
2. 硬件在環(HIL)與虛擬HIL測試:結合VECU與物理硬件或虛擬硬件模型,模擬復雜車輛場景,驗證軟件在接近真實條件下的表現。
3. 功能安全與網絡安全測試:依據ISO 26262和ISO/SAE 21434標準,評估VECU軟件的功能安全性和抗攻擊能力。
4. 性能與實時性測試:監控VECU的資源使用情況(如CPU、內存)和響應時間,確保軟件滿足實時性要求。
四、挑戰與未來展望
盡管VECU技術帶來了顯著優勢,但其集成開發與測試仍面臨挑戰,包括虛擬環境的保真度、工具鏈的兼容性以及測試覆蓋率的提升。未來,隨著人工智能和云計算技術的融合,VECU開發測試將更加智能化和自動化,支持更復雜的車輛功能與OTA(空中下載)更新。
VECU作為軟件定義汽車的核心要素,其集成開發與測試是確保汽車軟件質量與安全的關鍵。通過采用先進的開發方法和測試工具,行業能夠更快地交付可靠、創新的汽車軟件,推動智能出行的發展。